本文最后更新于:April 18, 2025 pm
本文作者:[wangwenhai] # 概要:一个非常简单的Arduino-Modbus协议模拟器
Arduino Meterbus 仪表模拟器
项目简介
本项目是一个基于ESP8266的Modbus从站模拟器,用于模拟Meterbus仪表的行为。它能够响应Modbus主站的请求,并返回预定义的数据。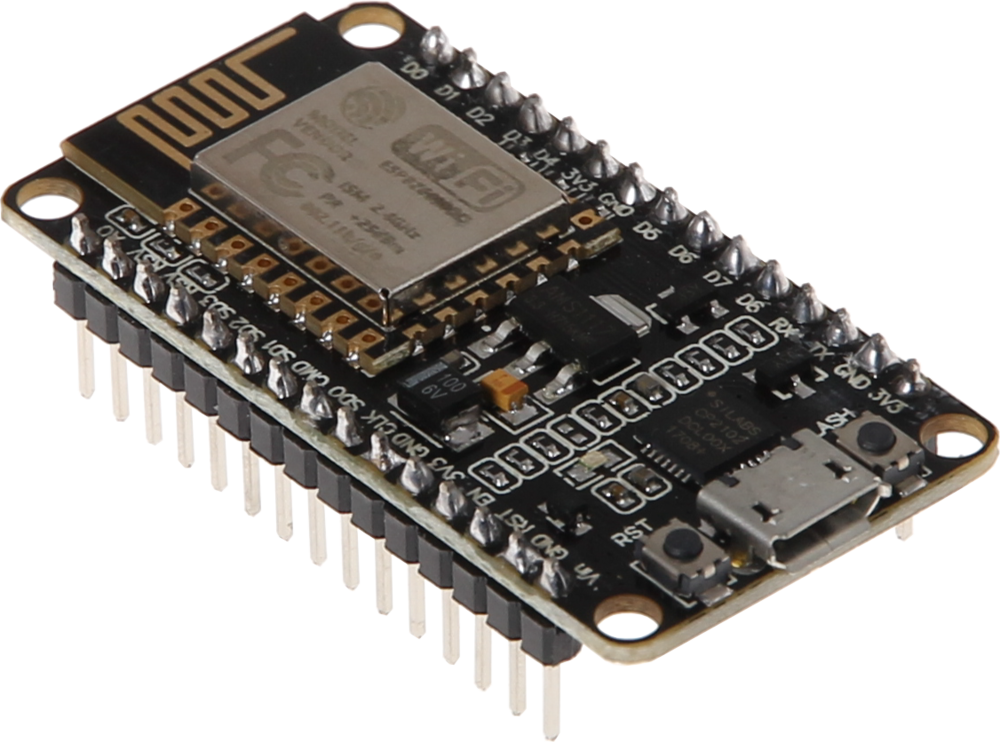
 |
 |
功能描述
- 支持Modbus功能码:
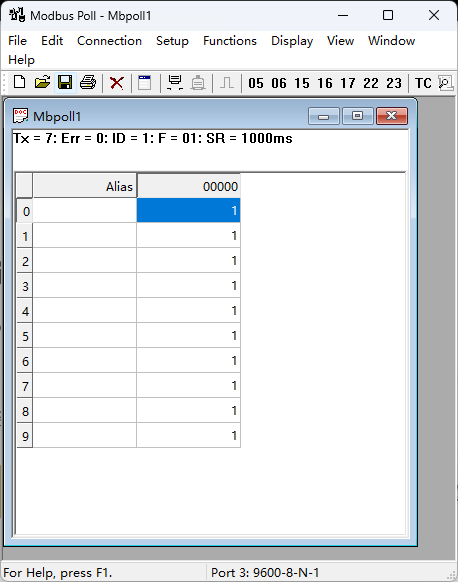
- 0x01: 读取线圈状态
- 0x02: 读取离散输入
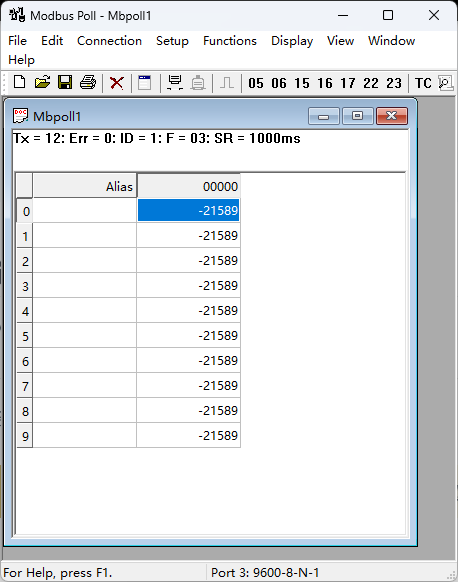
- 0x03: 读取保持寄存器
- 0x04: 读取输入寄存器
- 内置CRC16校验功能
- 通过串口与Modbus主站通信
使用方法
- 使用Arduino IDE打开项目
- 选择正确的开发板(ESP8266)和端口
- 上传代码到开发板
- 使用Modbus主站设备或软件通过串口与模拟器通信
硬件要求
- ESP8266开发板
- USB转串口适配器
软件依赖
- Arduino IDE
- ESP8266开发板支持包
项目结构
.
├── src
│ └── modbus_slave.ino
├── platformio.ini
└── README.md代码
modbus_slave.ino
#include <Arduino.h>
const int BUFFER_SIZE = 64;
const byte READ_HOLDING_REGISTERS = 0x03;
byte receiveBuffer[BUFFER_SIZE];
int receiveIndex = 0;
void setup()
{
Serial.begin(9600);
}
unsigned inline int crc16(byte *data, int length)
{
unsigned int crc = 0xFFFF;
for (int i = 0; i < length; i++)
{
crc ^= (unsigned int)data[i];
for (int j = 0; j < 8; j++)
{
if (crc & 0x0001)
{
crc >>= 1;
crc ^= 0xA001;
}
else
{
crc >>= 1;
}
}
}
return crc;
}
void sendReadCoilsResponse(uint8_t slaveId, uint16_t coilCount)
{
uint8_t byteCount = (coilCount + 7) / 8;
uint8_t responseBuffer[3 + byteCount];
responseBuffer[0] = slaveId;
responseBuffer[1] = 0x01;
responseBuffer[2] = byteCount;
for (uint8_t i = 0; i < byteCount; i++)
{
responseBuffer[3 + i] = 0xFF;
}
uint16_t crc = crc16(responseBuffer, 3 + byteCount);
uint8_t crcLow = crc & 0xFF;
uint8_t crcHigh = (crc >> 8) & 0xFF;
for (uint8_t i = 0; i < (3 + byteCount); i++)
{
Serial.write(responseBuffer[i]);
}
Serial.write(crcLow);
Serial.write(crcHigh);
}
void sendDynamicBytes(byte slaveId, unsigned short quantity)
{
byte byteCount = quantity * 2;
byte responseBuffer[3 + byteCount];
responseBuffer[0] = slaveId;
responseBuffer[1] = READ_HOLDING_REGISTERS;
responseBuffer[2] = byteCount;
for (int i = 0; i < byteCount; i++)
{
responseBuffer[3 + i] = 0xAB;
responseBuffer[4 + i] = 0xCD;
}
unsigned int crc = crc16(responseBuffer, 3 + byteCount);
byte crcLow = crc & 0xFF;
byte crcHigh = (crc >> 8) & 0xFF;
for (int i = 0; i < (3 + byteCount); i++)
{
Serial.write(responseBuffer[i]);
}
Serial.write(crcLow);
Serial.write(crcHigh);
}
void processModbusRequest()
{
byte slaveId = receiveBuffer[0];
byte functionCode = receiveBuffer[1];
// byte startAddressHigh = receiveBuffer[2];
// byte startAddressLow = receiveBuffer[3];
byte quantityHigh = receiveBuffer[4];
byte quantityLow = receiveBuffer[5];
// byte crcLow = receiveBuffer[6];
// byte crcHigh = receiveBuffer[7];
unsigned short quantity = (quantityHigh << 8) | quantityLow;
switch (functionCode)
{
case 1: // Read Coils
sendReadCoilsResponse(slaveId, quantity);
break;
case 2: // Read Discrete Inputs
sendReadCoilsResponse(slaveId, quantity);
break;
case 3: // Read Holding Registers
case 4: // Read Input Registers
sendDynamicBytes(slaveId, quantity);
break;
default:
break;
}
}
void loop()
{
while (Serial.available() > 0)
{
byte incomingByte = Serial.read();
receiveBuffer[receiveIndex++] = incomingByte;
if (receiveIndex >= 8)
{
processModbusRequest();
receiveIndex = 0;
}
}
delay(30);
}许可证
MIT License
本博客所有文章除特别声明外,均采用 CC BY-SA 4.0 协议 ,转载请注明出处!